OpenCV calibration helpers. More...
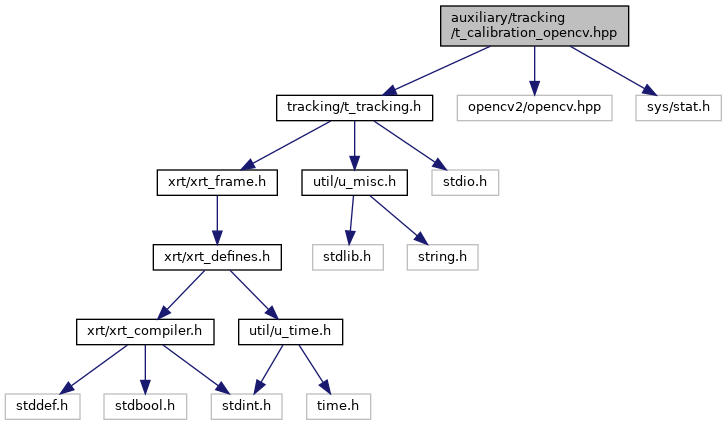
Include dependency graph for t_calibration_opencv.hpp:
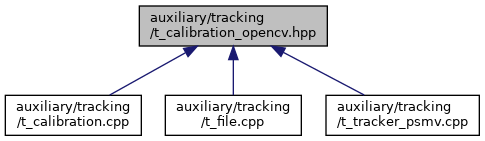
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Data Structures | |
| struct | CameraCalibrationWrapper |
| Essential calibration data wrapped for C++. More... | |
| struct | StereoCameraCalibrationWrapper |
| Essential stereo calibration data wrapped for C++. More... | |
| struct | RemapPair |
| An x,y pair of matrices for the remap() function. More... | |
| struct | ViewRectification |
| Rectification, rotation, projection data for a single view in a stereo pair. More... | |
| struct | StereoRectificationMaps |
| Rectification maps as well as transforms for a stereo camera. More... | |
| class | NormalizedCoordsCache |
| Provides cached, precomputed access to normalized image coordinates from original, distorted ones. More... | |
Functions | |
| RemapPair | calibration_get_undistort_map (t_camera_calibration &calib, cv::InputArray rectify_transform_optional=cv::noArray(), cv::Mat new_camera_matrix_optional=cv::Mat()) |
| Prepare undistortion/normalization remap structures for a rectilinear or fisheye image. More... | |
Detailed Description
OpenCV calibration helpers.
Function Documentation
◆ calibration_get_undistort_map()
| RemapPair calibration_get_undistort_map | ( | t_camera_calibration & | calib, |
| cv::InputArray | rectify_transform_optional = cv::noArray(), |
||
| cv::Mat | new_camera_matrix_optional = cv::Mat() |
||
| ) |
Prepare undistortion/normalization remap structures for a rectilinear or fisheye image.
- Parameters
-
calib A single camera calibration structure. rectify_transform_optional A rectification transform to apply, if desired. new_camera_matrix_optional Unlike OpenCV, the default/empty matrix here uses the input camera matrix as your output camera matrix.
- Todo:
- Scale Our intrinsics if the frame size we request
References CameraCalibrationWrapper::distortion_fisheye_mat, CameraCalibrationWrapper::distortion_mat, xrt_size::h, t_camera_calibration::image_size_pixels, CameraCalibrationWrapper::intrinsics_mat, RemapPair::remap_x, RemapPair::remap_y, t_camera_calibration::use_fisheye, and xrt_size::w.
Referenced by StereoRectificationMaps::StereoRectificationMaps().
