Essential stereo calibration data wrapped for C++. More...
#include <tracking/t_calibration_opencv.hpp>
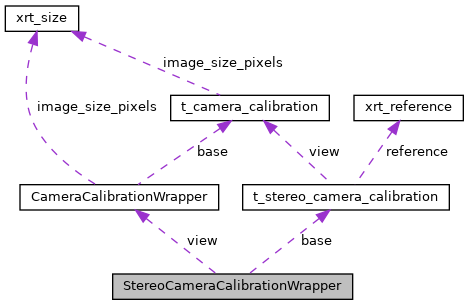
Collaboration diagram for StereoCameraCalibrationWrapper:
Public Member Functions | |
| StereoCameraCalibrationWrapper (t_stereo_camera_calibration *stereo) | |
| StereoCameraCalibrationWrapper () | |
| ~StereoCameraCalibrationWrapper () | |
| bool | isDataStorageValid () const noexcept |
Static Public Member Functions | |
| static t_stereo_camera_calibration * | allocData () |
Data Fields | |
| t_stereo_camera_calibration * | base |
| CameraCalibrationWrapper | view [2] |
| cv::Mat_< double > | camera_translation_mat |
| cv::Mat_< double > | camera_rotation_mat |
| cv::Mat_< double > | camera_essential_mat |
| cv::Mat_< double > | camera_fundamental_mat |
Detailed Description
Essential stereo calibration data wrapped for C++.
Just like the cv::Mat that it holds, this object does not own (all) the memory it points to!
Constructor & Destructor Documentation
◆ StereoCameraCalibrationWrapper() [1/2]
|
inline |
References t_stereo_camera_calibration::view.
◆ StereoCameraCalibrationWrapper() [2/2]
|
inline |
References CameraCalibrationWrapper::base.
◆ ~StereoCameraCalibrationWrapper()
|
inline |
Member Function Documentation
◆ allocData()
|
inlinestatic |
References t_stereo_camera_calibration_alloc().
◆ isDataStorageValid()
|
inlinenoexcept |
Field Documentation
◆ base
| t_stereo_camera_calibration* StereoCameraCalibrationWrapper::base |
◆ camera_essential_mat
| cv::Mat_<double> StereoCameraCalibrationWrapper::camera_essential_mat |
◆ camera_fundamental_mat
| cv::Mat_<double> StereoCameraCalibrationWrapper::camera_fundamental_mat |
◆ camera_rotation_mat
| cv::Mat_<double> StereoCameraCalibrationWrapper::camera_rotation_mat |
Referenced by StereoRectificationMaps::StereoRectificationMaps().
◆ camera_translation_mat
| cv::Mat_<double> StereoCameraCalibrationWrapper::camera_translation_mat |
Referenced by StereoRectificationMaps::StereoRectificationMaps().
◆ view
| CameraCalibrationWrapper StereoCameraCalibrationWrapper::view[2] |
Referenced by StereoRectificationMaps::StereoRectificationMaps().
The documentation for this struct was generated from the following file:
- auxiliary/tracking/t_calibration_opencv.hpp
