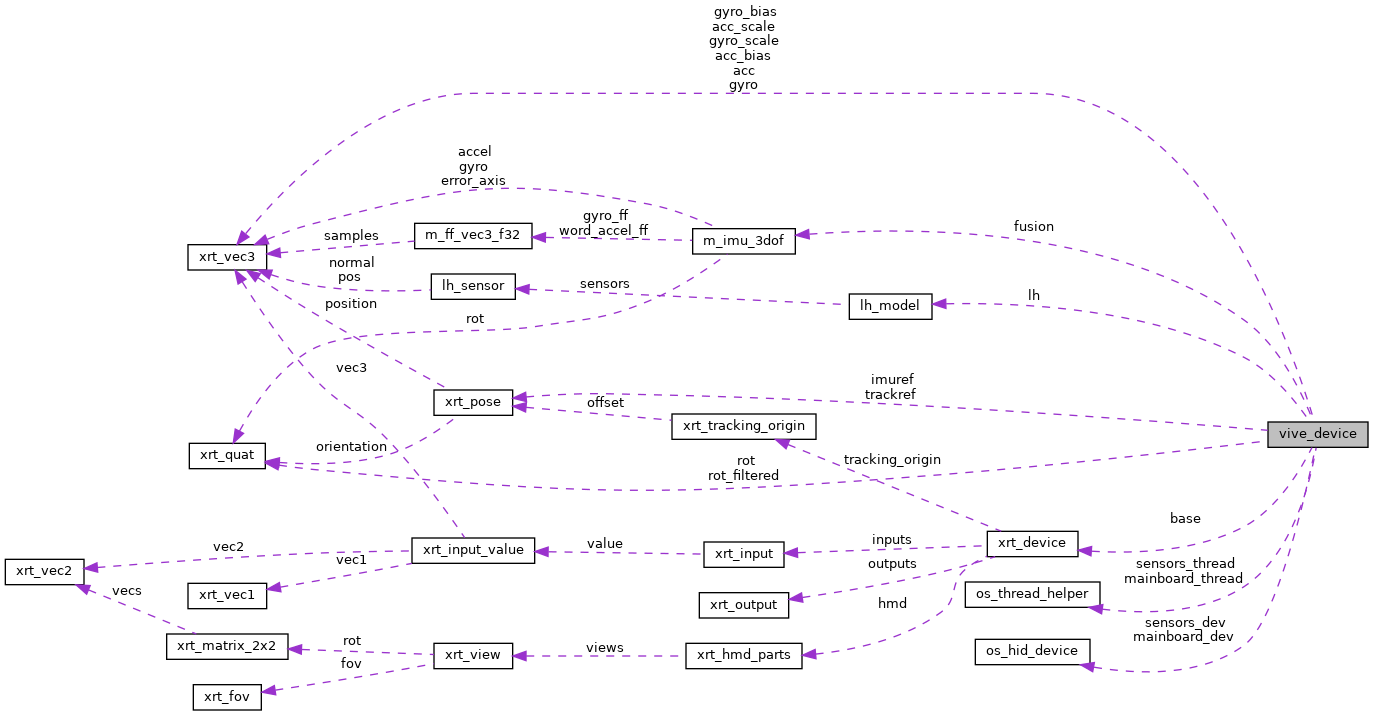
#include <vive/vive_device.h>
◆ acc
◆ acc_bias
◆ acc_range
| double vive_device::acc_range |
◆ acc_scale
◆ base
◆ board
| struct { ... } vive_device::board |
◆ button
| uint8_t vive_device::button |
◆ calibration
| bool vive_device::calibration |
◆ device_serial_number
| char* vive_device::device_serial_number |
◆ disconnect_notified
| bool vive_device::disconnect_notified |
◆ display
| struct { ... } vive_device::display |
◆ display_firmware_version
| uint32_t vive_device::display_firmware_version |
◆ eye_target_height_in_pixels
| uint16_t vive_device::eye_target_height_in_pixels |
◆ eye_target_width_in_pixels
| uint16_t vive_device::eye_target_width_in_pixels |
◆ firmware
| struct { ... } vive_device::firmware |
◆ firmware_version
| uint32_t vive_device::firmware_version |
◆ fusion
◆ gui
| struct { ... } vive_device::gui |
◆ gyro
◆ gyro_bias
◆ gyro_range
| double vive_device::gyro_range |
◆ gyro_scale
◆ hardware_revision
| uint8_t vive_device::hardware_revision |
◆ hardware_version_major
| uint8_t vive_device::hardware_version_major |
◆ hardware_version_micro
| uint8_t vive_device::hardware_version_micro |
◆ hardware_version_minor
| uint8_t vive_device::hardware_version_minor |
◆ imu
| struct { ... } vive_device::imu |
◆ imuref
Head position in IMU space.
◆ ipd
| uint16_t vive_device::ipd |
◆ last [1/2]
| struct { ... } vive_device::last |
◆ last [2/2]
◆ last_sample_time_raw
| uint32_t vive_device::last_sample_time_raw |
◆ lens_separation [1/2]
| double vive_device::lens_separation |
◆ lens_separation [2/2]
| uint16_t vive_device::lens_separation |
◆ lh
◆ mainboard_dev
◆ mainboard_thread
◆ mb_serial_number
| char* vive_device::mb_serial_number |
◆ model_number
| char* vive_device::model_number |
◆ persistence
| double vive_device::persistence |
◆ print_debug
| bool vive_device::print_debug |
◆ print_spew
| bool vive_device::print_spew |
◆ proximity
| uint16_t vive_device::proximity |
◆ rot
◆ rot_filtered
| struct xrt_quat vive_device::rot_filtered |
◆ sensors_dev
◆ sensors_thread
◆ sequence
| uint8_t vive_device::sequence |
◆ time_ns
| uint64_t vive_device::time_ns |
◆ trackref
IMU position in tracking space.
Head position in tracking space.
◆ variant
The documentation for this struct was generated from the following file: