Stereo camera calibration data to be given to trackers. More...
#include <tracking/t_tracking.h>
Data Fields | |
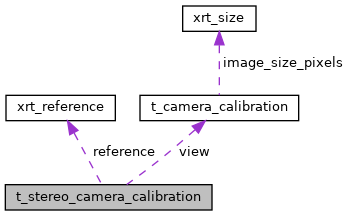
| struct xrt_reference | reference |
| Ref counting. More... | |
| struct t_camera_calibration | view [2] |
| Calibration of individual views/sensor. More... | |
| double | camera_translation [3] |
| Translation from first to second in the stereo pair. More... | |
| double | camera_rotation [3][3] |
| Rotation matrix from first to second in the stereo pair. More... | |
| double | camera_essential [3][3] |
| Essential matrix. More... | |
| double | camera_fundamental [3][3] |
| Fundamental matrix. More... | |
Detailed Description
Stereo camera calibration data to be given to trackers.
Field Documentation
◆ camera_essential
| double t_stereo_camera_calibration::camera_essential[3][3] |
Essential matrix.
Referenced by StereoCameraCalibrationWrapper::isDataStorageValid().
◆ camera_fundamental
| double t_stereo_camera_calibration::camera_fundamental[3][3] |
Fundamental matrix.
Referenced by StereoCameraCalibrationWrapper::isDataStorageValid().
◆ camera_rotation
| double t_stereo_camera_calibration::camera_rotation[3][3] |
Rotation matrix from first to second in the stereo pair.
Referenced by StereoCameraCalibrationWrapper::isDataStorageValid().
◆ camera_translation
| double t_stereo_camera_calibration::camera_translation[3] |
Translation from first to second in the stereo pair.
Referenced by StereoCameraCalibrationWrapper::isDataStorageValid().
◆ reference
| struct xrt_reference t_stereo_camera_calibration::reference |
Ref counting.
◆ view
| struct t_camera_calibration t_stereo_camera_calibration::view[2] |
Calibration of individual views/sensor.
Referenced by StereoCameraCalibrationWrapper::StereoCameraCalibrationWrapper(), and StereoRectificationMaps::StereoRectificationMaps().
The documentation for this struct was generated from the following file:
- auxiliary/tracking/t_tracking.h
