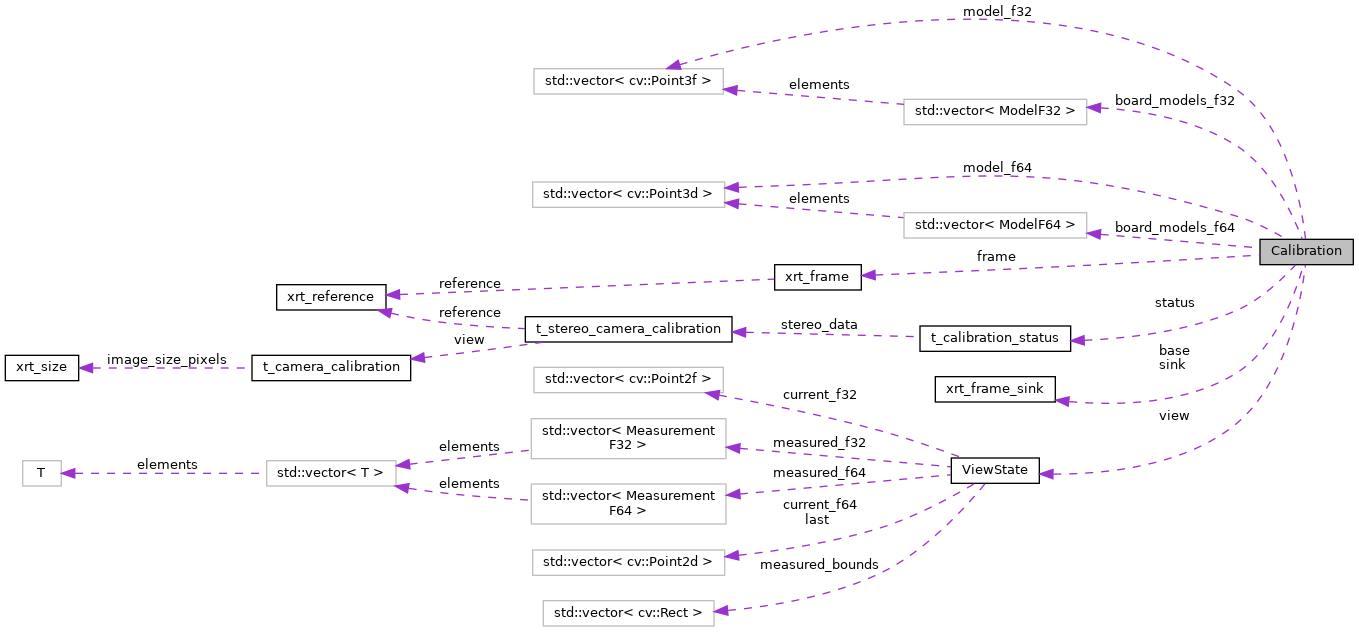
Main class for doing calibration. More...
Data Fields | |
| struct xrt_frame_sink | base = {} |
| struct { | |
| cv::Mat rgb = {} | |
| struct xrt_frame * frame = {} | |
| struct xrt_frame_sink * sink = {} | |
| } | gui |
| struct { | |
| ModelF32 model_f32 = {} | |
| ModelF64 model_f64 = {} | |
| cv::Size dims = {8, 6} | |
| enum t_board_pattern pattern = T_BOARD_CHECKERS | |
| float spacing_meters = 0.05 | |
| } | board |
| struct { | |
| ViewState view [2] = {} | |
| ArrayOfModelF32s board_models_f32 = {} | |
| ArrayOfModelF64s board_models_f64 = {} | |
| uint32_t calibration_count = {} | |
| bool calibrated = false | |
| uint32_t cooldown = 0 | |
| uint32_t waited_for = 0 | |
| uint32_t collected_of_part = 0 | |
| } | state |
| struct { | |
| bool enabled = false | |
| uint32_t num_images = 20 | |
| } | load |
| bool | subpixel_enable = true |
| Should we use subpixel enhancing for checkerboard. More... | |
| int | subpixel_size = 5 |
| What subpixel range for checkerboard enhancement. More... | |
| uint32_t | num_cooldown_frames = 20 |
| Number of frames to wait for cooldown. More... | |
| uint32_t | num_wait_for = 5 |
| Number of frames to wait for before collecting. More... | |
| uint32_t | num_collect_total = 20 |
| Total number of samples to collect. More... | |
| uint32_t | num_collect_restart = 1 |
| Number of frames to capture before restarting. More... | |
| bool | use_fisheye = false |
| Is the camera fisheye. More... | |
| bool | stereo_sbs = false |
| From parameters. More... | |
| bool | clear_frame = false |
| Should we clear the frame. More... | |
| bool | dump_measurements = false |
| Dump all of the measurements to stdout. More... | |
| bool | save_images = false |
| Should we save images used for capture. More... | |
| bool | mirror_rgb_image = false |
| Should we mirror the rgb images. More... | |
| cv::Mat | gray = {} |
| char | text [512] = {} |
| t_calibration_status * | status |
Detailed Description
Main class for doing calibration.
Field Documentation
◆ base
| struct xrt_frame_sink Calibration::base = {} |
Referenced by t_calibration_stereo_create().
◆ board
| struct { ... } Calibration::board |
Referenced by t_calibration_stereo_create().
◆ board_models_f32
| ArrayOfModelF32s Calibration::board_models_f32 = {} |
◆ board_models_f64
| ArrayOfModelF64s Calibration::board_models_f64 = {} |
◆ calibrated
| bool Calibration::calibrated = false |
◆ calibration_count
| uint32_t Calibration::calibration_count = {} |
◆ clear_frame
| bool Calibration::clear_frame = false |
Should we clear the frame.
◆ collected_of_part
| uint32_t Calibration::collected_of_part = 0 |
◆ cooldown
| uint32_t Calibration::cooldown = 0 |
◆ dims
| cv::Size Calibration::dims = {8, 6} |
Referenced by t_calibration_stereo_create().
◆ dump_measurements
| bool Calibration::dump_measurements = false |
Dump all of the measurements to stdout.
◆ enabled
| bool Calibration::enabled = false |
Referenced by t_calibration_frame(), and t_calibration_stereo_create().
◆ frame
| struct xrt_frame* Calibration::frame = {} |
◆ gray
| cv::Mat Calibration::gray = {} |
◆ gui
| struct { ... } Calibration::gui |
Referenced by t_calibration_stereo_create().
◆ load
| struct { ... } Calibration::load |
Referenced by t_calibration_frame(), and t_calibration_stereo_create().
◆ mirror_rgb_image
| bool Calibration::mirror_rgb_image = false |
Should we mirror the rgb images.
Referenced by t_calibration_stereo_create().
◆ model_f32
| ModelF32 Calibration::model_f32 = {} |
◆ model_f64
| ModelF64 Calibration::model_f64 = {} |
◆ num_collect_restart
| uint32_t Calibration::num_collect_restart = 1 |
Number of frames to capture before restarting.
Referenced by t_calibration_stereo_create().
◆ num_collect_total
| uint32_t Calibration::num_collect_total = 20 |
Total number of samples to collect.
Referenced by t_calibration_stereo_create().
◆ num_cooldown_frames
| uint32_t Calibration::num_cooldown_frames = 20 |
Number of frames to wait for cooldown.
Referenced by t_calibration_stereo_create().
◆ num_images
| uint32_t Calibration::num_images = 20 |
Referenced by t_calibration_stereo_create().
◆ num_wait_for
| uint32_t Calibration::num_wait_for = 5 |
Number of frames to wait for before collecting.
Referenced by t_calibration_stereo_create().
◆ pattern
| enum t_board_pattern Calibration::pattern = T_BOARD_CHECKERS |
Referenced by t_calibration_stereo_create().
◆ rgb
| cv::Mat Calibration::rgb = {} |
◆ save_images
| bool Calibration::save_images = false |
Should we save images used for capture.
Referenced by t_calibration_stereo_create().
◆ sink
| struct xrt_frame_sink* Calibration::sink = {} |
Referenced by t_calibration_stereo_create().
◆ spacing_meters
| float Calibration::spacing_meters = 0.05 |
Referenced by t_calibration_stereo_create().
◆ state
| struct { ... } Calibration::state |
◆ status
| t_calibration_status* Calibration::status |
Referenced by t_calibration_stereo_create().
◆ stereo_sbs
| bool Calibration::stereo_sbs = false |
From parameters.
Referenced by t_calibration_stereo_create().
◆ subpixel_enable
| bool Calibration::subpixel_enable = true |
Should we use subpixel enhancing for checkerboard.
Referenced by t_calibration_stereo_create().
◆ subpixel_size
| int Calibration::subpixel_size = 5 |
What subpixel range for checkerboard enhancement.
Referenced by t_calibration_stereo_create().
◆ text
| char Calibration::text[512] = {} |
◆ use_fisheye
| bool Calibration::use_fisheye = false |
Is the camera fisheye.
Referenced by t_calibration_stereo_create().
◆ view
| ViewState Calibration::view[2] = {} |
◆ waited_for
| uint32_t Calibration::waited_for = 0 |
The documentation for this class was generated from the following file:
- auxiliary/tracking/t_calibration.cpp
