C++ sensor fusion/filtering code that uses flexkalman. More...
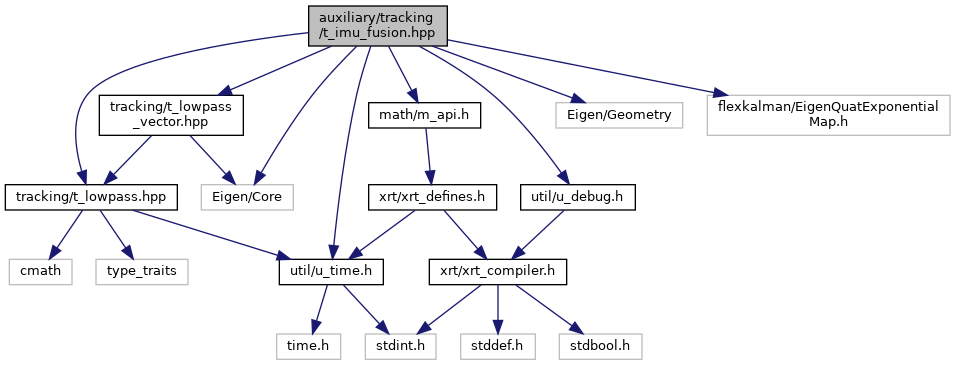
#include "tracking/t_lowpass.hpp"#include "tracking/t_lowpass_vector.hpp"#include "math/m_api.h"#include "util/u_time.h"#include "util/u_debug.h"#include <Eigen/Core>#include <Eigen/Geometry>#include "flexkalman/EigenQuatExponentialMap.h"
Include dependency graph for t_imu_fusion.hpp:
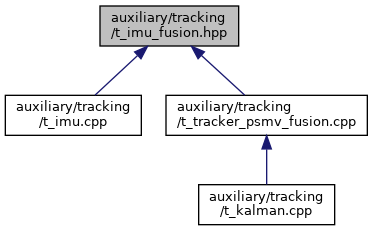
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Data Structures | |
| class | xrt_fusion::SimpleIMUFusion |
Namespaces | |
| xrt_fusion | |
Macros | |
| #define | SIMPLE_IMU_DEBUG(MSG) |
| #define | SIMPLE_IMU_SPEW(MSG) |
Detailed Description
C++ sensor fusion/filtering code that uses flexkalman.
Macro Definition Documentation
◆ SIMPLE_IMU_DEBUG
| #define SIMPLE_IMU_DEBUG | ( | MSG | ) |
Value:
do { \
if (debug_) { \
printf("SimpleIMU(%p): " MSG "\n", \
(const void *)this); \
} \
} while (0)
Referenced by xrt_fusion::SimpleIMUFusion::handleGyro(), and xrt_fusion::SimpleIMUFusion::SimpleIMUFusion().
◆ SIMPLE_IMU_SPEW
| #define SIMPLE_IMU_SPEW | ( | MSG | ) |
Value:
do { \
if (spew_) { \
printf("SimpleIMU(%p): " MSG "\n", \
(const void *)this); \
} \
} while (0)
