V4L2 frameserver implementation. More...
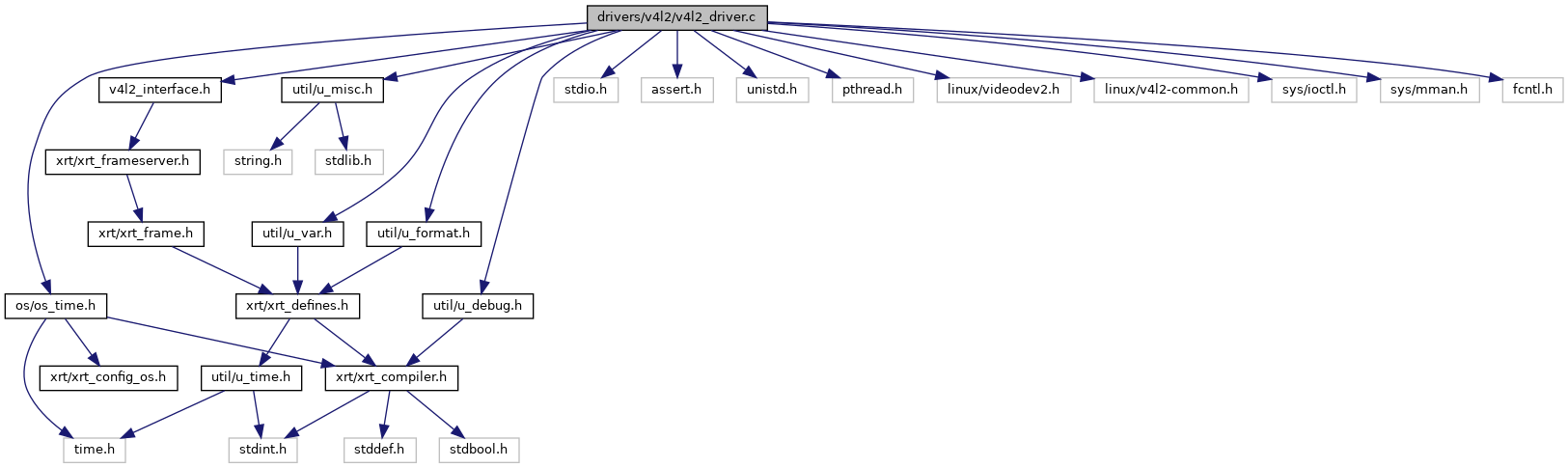
#include "os/os_time.h"#include "util/u_var.h"#include "util/u_misc.h"#include "util/u_debug.h"#include "util/u_format.h"#include "v4l2_interface.h"#include <stdio.h>#include <assert.h>#include <unistd.h>#include <pthread.h>#include <linux/videodev2.h>#include <linux/v4l2-common.h>#include <sys/ioctl.h>#include <sys/mman.h>#include <fcntl.h>
Include dependency graph for v4l2_driver.c:
Data Structures | |
| struct | v4l2_frame |
| struct | v4l2_control_state |
| struct | v4l2_fs |
| A single open v4l2 capture device, starts it's own thread and waits on it. More... | |
Macros | |
| #define | V_SPEW(p, ...) |
| #define | V_DEBUG(p, ...) |
| #define | V_ERROR(p, ...) |
| #define | V_CONTROL_GET(VID, CONTROL) |
| #define | V_CONTROL_SET(VID, CONTROL, VALUE) |
| #define | NUM_V4L2_BUFFERS 3 |
| #define | CASE(CONTROL) case V4L2_CID_##CONTROL: str = "V4L2_CID_" #CONTROL; break |
| #define | V_CHECK(FLAG) |
Functions | |
| struct xrt_fs * | v4l2_fs_create (struct xrt_frame_context *xfctx, const char *path) |
| Create a v4l2 frameserver. More... | |
Detailed Description
V4L2 frameserver implementation.
Macro Definition Documentation
◆ CASE
| #define CASE | ( | CONTROL | ) | case V4L2_CID_##CONTROL: str = "V4L2_CID_" #CONTROL; break |
◆ NUM_V4L2_BUFFERS
| #define NUM_V4L2_BUFFERS 3 |
◆ V_CHECK
| #define V_CHECK | ( | FLAG | ) |
Value:
do { \
if (queryctrl.flags & V4L2_CTRL_FLAG_##FLAG) { \
fprintf(stderr, ", " #FLAG); \
} \
} while (false)
◆ V_CONTROL_GET
| #define V_CONTROL_GET | ( | VID, | |
| CONTROL | |||
| ) |
Value:
do { \
int _value = 0; \
if (v4l2_control_get(VID, V4L2_CID_##CONTROL, &_value) != 0) { \
V_ERROR(VID, "failed to get V4L2_CID_" #CONTROL); \
} else { \
V_DEBUG(VID, "V4L2_CID_" #CONTROL " = %i", _value); \
} \
} while (false);
◆ V_CONTROL_SET
| #define V_CONTROL_SET | ( | VID, | |
| CONTROL, | |||
| VALUE | |||
| ) |
Value:
do { \
if (v4l2_control_set(VID, V4L2_CID_##CONTROL, VALUE) != 0) { \
V_ERROR(VID, "failed to set V4L2_CID_" #CONTROL); \
} \
} while (false);
◆ V_DEBUG
| #define V_DEBUG | ( | p, | |
| ... | |||
| ) |
Value:
do { \
if (p->print_debug) { \
fprintf(stderr, "%s - ", __func__); \
fprintf(stderr, __VA_ARGS__); \
fprintf(stderr, "\n"); \
} \
} while (false)
◆ V_ERROR
| #define V_ERROR | ( | p, | |
| ... | |||
| ) |
Value:
do { \
fprintf(stderr, "%s - ", __func__); \
fprintf(stderr, __VA_ARGS__); \
fprintf(stderr, "\n"); \
} while (false)
◆ V_SPEW
| #define V_SPEW | ( | p, | |
| ... | |||
| ) |
Value:
do { \
if (p->print_spew) { \
fprintf(stderr, "%s - ", __func__); \
fprintf(stderr, __VA_ARGS__); \
fprintf(stderr, "\n"); \
} \
} while (false)
